2025-09-01 17:31:02
链接点击:https://mp.weixin.qq.com/s/Azcg90WbldhQw3At1X8Ktg
在农业科技飞速发展的今天,作物表型数据采集对于作物育种意义重大,而表型机器人的自主导航技术更是关键。
华中农业大学的研究团队提出了一种基于地空协作的表型机器人自主导航方法,该研究成果发表于《Artificial Intelligence in Agriculture》。此方法借助无人机与地面机器人的协同工作,构建起 “全局感知 - 局部执行” 的闭环优化系统,有效解决了传统导航技术依赖静态环境的难题,显著提升了表型机器人在动态农田环境中的导航精度与适应性。
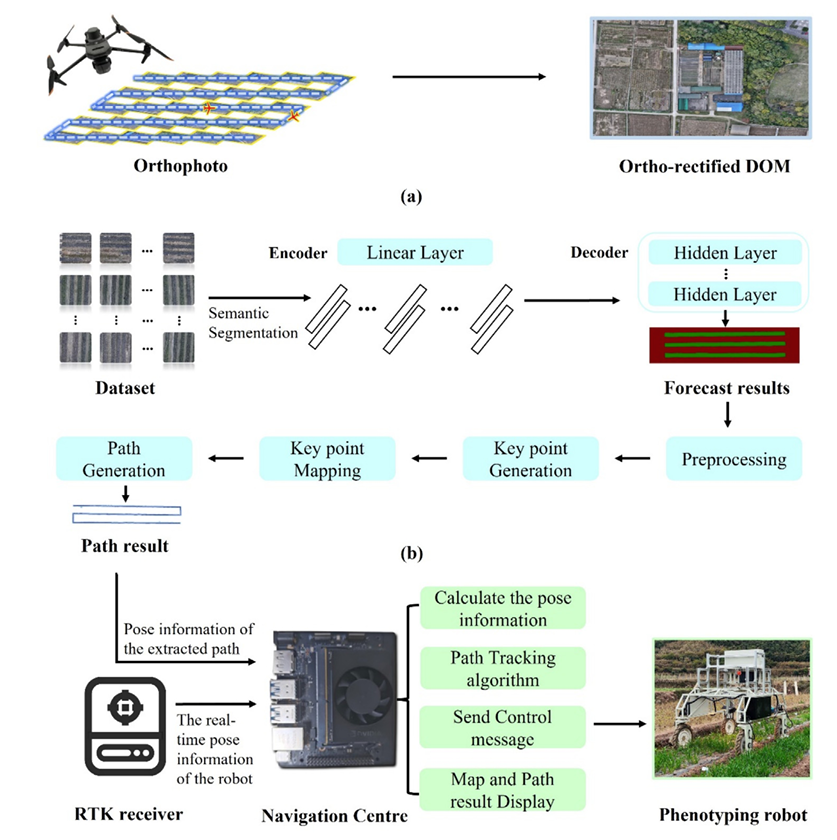
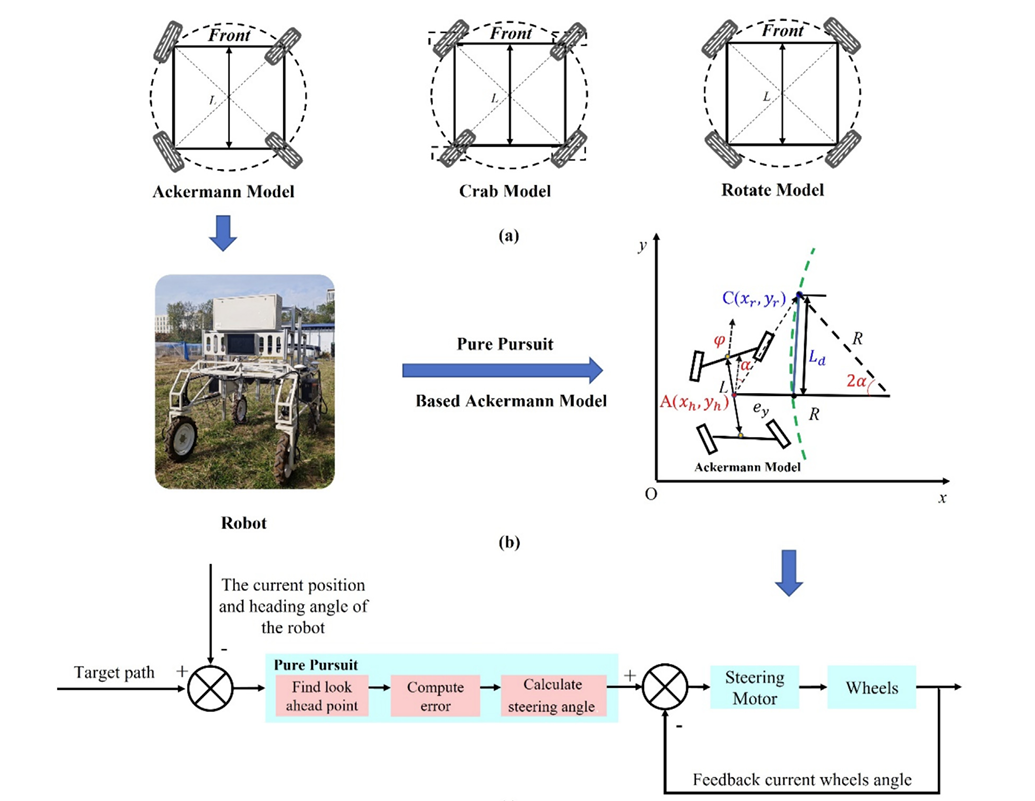
研究人员使用配备实时动态定位(RTK)模块和可见光相机的无人机,对作物种植区域进行航拍,构建高精度数字正射影像图(DOM)。接着,运用 SegFormor-B0 语义分割模型检测作物行,提取关键坐标点,并映射到实际地理坐标,从而生成导航路径。此外,基于纯追踪算法设计自适应控制器,依据机器人当前位置与目标位置的距离、角度偏差和横向偏差,实时动态调整转向角度,确保机器人精准沿路径行驶。